Cara, se você quer aprender Arduino para trabalhar profissionalmente, você precisa estudar o chip do Arduino e a plataforma Microchip Studio.
Bora maratonar essas duas séries?
A primeira é sobre a plataforma Microchip Studio, mostrando as funcionalidades da IDE de desenvolvimento da Microchip, com funcionalidades como Debug, Simulação de chip entre outras. Um ambiente profissional (15 vídeos).
A segunda é sobre o microcontrolador da família AVR (ATmega328pb) utilizado no Arduino Uno (29 vídeos).
Para você conseguir ver a playlist inteira, abra no Youtube os vídeos abaixo ;-).
Primeira – Iniciando na plataforma Microchip Studio:
Segunda- Iniciando no desenvolvimento dos microcontroladores AVR:
Um
Schmitt trigger é um circuito comparador com histerese implementado
pela aplicação de realimentação positiva à entrada não inversora de um
comparador ou amplificador diferencial.
Ele é um circuito ativo que converte um sinal de entrada analógica em um sinal de saída digital.
O
circuito é chamado de “gatilho” (trigger) porque a saída retém seu
valor até que a entrada mude o suficiente para disparar uma mudança no
sinal de saída.
O
Schimitt trigger possui dois níveis de disparo que são o ‘limiar
superior’ e o ‘limiar inferior’ conforme indicado na função de
transferência exibida abaixo:
Os
eixos horizontal e vertical correspondem respectivamente à tensão de
entrada e de saída. T e −T são os limites de comutação, e M e −M são os
níveis de tensão de saída.
O diagrama abaixo compara o comportamento de um circuito Schimitt triger com um buffer, ambos não inversores.
Configuração inversora e não inversora:
Na
configuração não inversora, quando a entrada é maior que o limiar
superior, a saída é alta. Quando a entrada está abaixo do limiar
inferior, a saída é baixa e, quando a entrada está entre os limiares
inferior e superior, o valor na saída do circuito é constante.
Na
configuração inversora, quando a entrada é maior que o limiar superior,
a saída é baixa. Quando a entrada está abaixo do limiar inferior, a
saída é alta e, quando a entrada está entre os limiares inferior e
superior, o valor na saída do circuito é constante.
Esse
comportamento de limiar de disparo duplo que o sinal de saída muda
quando o sinal de entrada atinge valores limiares distintos, é chamada
de histerese. Podemos até dizer que o Schimitt trigger possui memória e
pode atuar como um multivibrador biestável (latch ou flip-flop).
Existe uma estreita relação entre os dois tipos de circuitos: um Schimitt trigger pode ser convertido em um latch e vice versa.
Schimitt trigger serve para fazer o condicionamento de sinais em circuitos digitais reduzindo o ruído dos mesmos, particularmente reduzindo (não elimina completamente em alguns casos) o efeito de repique (bounce) de chaves eletromecânicas. Também são utilizados em configurações com feedback em loop negativo, implementando osciladores de relaxamanto que encontram aplicação em geradores de função e fontes de alimentação chaveadas.
Há várias maneiras de se implementar um circuito Schmitt trigger e uma delas seria pela utilização de um amplificador operacional.
Pode-se
fazer um conversor analógico-digital utilizando um amplificador
operacional cuja entrada analógica recebe o sinal e a saída do
amplificador operacional fornece o sinal de saída digital.
Isso
é possível por conta do alto ganho do amplificador operacional e quando
o sinal passa de um certo limite, a saída satura ou corta imediatamente
como em um processo de avalanche.
Abaixo
seguem dois diagramas básicos (não são circuitos completos), um
utilizando a entrada não inversora e outro utilizando a entrada
inversora de um amplificador operacional:
Comparador não inversor:
Para
o comparador não inversor os dois resistores R1 e R2 formam um somador
de tensão paralela. Ele soma uma parte da tensão de saída à tensão de
entrada, aumentando-a durante e após a comutação, que ocorre quando a
tensão resultante está próxima de zero. Este feedback positivo paralelo
cria a histerese necessária que é controlada pela proporção entre as
resistências R1 e R2. A saída do somador de tensão paralela é em relação
ao terra, então o circuito não precisa de um amplificador com entrada
diferencial. Como os amplificadores operacionais convencionais têm uma
entrada diferencial, a entrada inversora é aterrada para criando o ponto
de referência zero volts.
Comparador inversor:
Para
a versão utilizando o comparador inversor, a atenuação e a soma são
separadas. Os dois resistores R1 e R2 atuam apenas como um divisor de
tensão (atenuador “puro”). O loop de entrada atua como um somador de
tensão simples que soma uma parte da tensão de saída em série à tensão
aplicada no circuito de entrada. Este feedback positivo em série cria a
histerese necessária que é controlada pela proporção entre as
resistências de R1 e a resistência do conjunto R1 e R2. A tensão efetiva
aplicada à entrada do amplificador operacional está flutuando, logo, o
amplificador operacional deve ter uma entrada diferencial.
Maiores detalhes sobre essa configuração pode ser vista na Wikipedia e está bem detalhada no livro The Art of Electronics.
Na eletrônica digital:
A implementação desse tipo de circuito é representada pelos símbolos abaixo e normalmente estão dentro de circuitos integrados:
Símbolo
que representa um Schmitt trigger. Ele possui o desenho de uma curva de
histerese dentro do símbolo lógico de um buffer, cuja saída pode ser
normal ou inversa (com a bolinha). Detalhes acerca do comportamento de
um circuito integrado Schmitt trigger deve ser verificada na
documentação do componente, que é fornecida pelo fabricante.
O
código binário refletido (reflected binary code – RBC), também
conhecido como código binário refletido (reflected binary RB) ou código
cinza (Gray code – depois dos estudos de Frank Gray), consiste da
ordenação do sistema numeral binário de maneira tal que dois valores
binários sucessivos tenham apenas um bit de diferença entre ambos.
O
código Gray foi inicialmente projetado para minimizar o efeito de
ruídos aleatórios causados pelo chaveamento de dispositivos
eletromecânicos como relés.
Hoje
em dia o código Gray é largamente utilizado para facilitar a correção
de erros em sistemas de comunicação digital como em televisão e em
alguns sistemas de TV a cabo.
Considerando
um sistema de posicionamento eletromecânico que faz uso de uma contagem
binária, é muito improvável que interruptores físicos consigam comutar
simultaneamente à medida que ocorre o posicionamento desse sistema e
essa falta de sincronismo causa ruídos no circuito. Para contornar essa
limitação, foi criado o Gray Code, que somente uma chave por vez muda de
estado à medida que o posicionamento acontece, contornando o problema
da falta sincronização na atuação das chaves mecânicas.
Abaixo
segue uma tabela exibindo a diferença entre o código binário e o código
Gray. Conforme dito, note que no código Gray, apenas um bit muda entre o
valor anterior e o valor posterior.
Aplicações:
Em matemática pode ser aplicado na resolução do problema da Torre de Hanoi.
Émile Baudot utilizou o código Gray nos telégrafos em 1878.
Frank
Gray patenteou em 1953 um método para converter sinais analógicos para o
código Gray utilizando válvula,que fez o sistema “pegar o seu nome”.
Minimização de circuitos booleanos (lógica digital) na rotulação dos eixos do mapa de Karnaugh.
É
utilizado em sistemas de posicionamento tanto lineares como rotativos
(encoder). Inicialmente era eletromecânico e atualmente utiliza sensores
óticos, de efeito hall ou usa outras tecnologias eletrônicas.
Figura: Petruzella
Também pode ser aplicado em outras áreas como algoritmos genéticos, minimização de circuitos eletrônicos e correção de erros, por exemplo.
O
OS Kernel ou Núcleo do Sistema Operacional é um programa de computador
que é o coração do sistema operacional de um computador. Ele tem
controle completo sobre tudo que acontece no sistema.
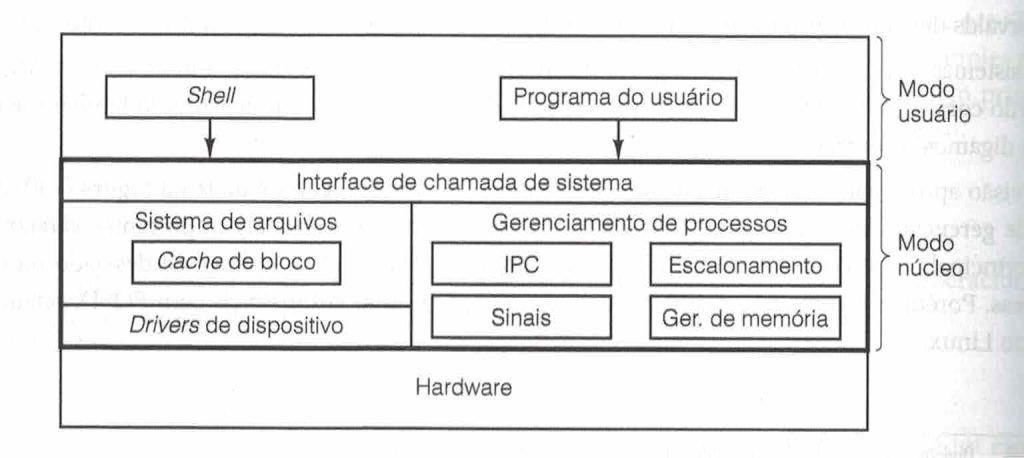
Abaixo tem a estrutura básica de um sistema operacional Unix, situando o modo núcleo.
Fonte: TANENBAUM
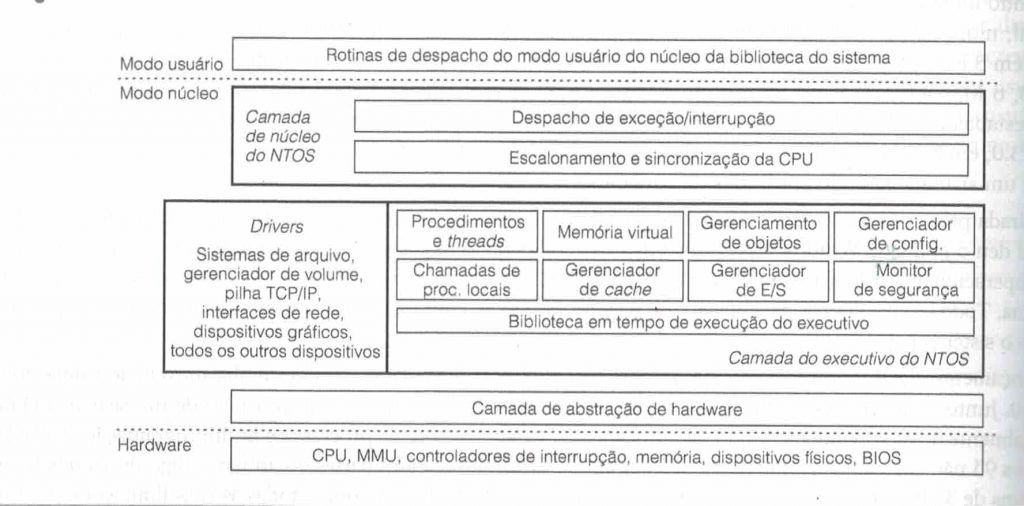
E aqui tem a estrutura básica de um sistema operacional Windows 7 situando o modo núcleo do sistema operacional:
Fonte: TANENBAUM
Na
maioria dos sistemas ele é um dos primeiros programas a serem
carregados na inicialização, logo após do carregador inicial
(bootloader). Ele gerencia as demais inicializações assim como as
requisições de entrada e saída do software, traduzindo-as em instruções
de processamento de dados para o processador do computador. Ele também
manuseia a memória e periféricos como teclado, monitor, impressoras e
interface de áudio.
O Kernel faz a interface entre o software da aplicação e o hardware do computador.
A
parte crítica do código do Kernel é normalmente carregada em uma área
separada da memória a qual é protegida de ser acessada pelos programas
ou outras partes menos críticas do sistema operacional.
O
Kernel executa suas tarefas como rodar processos, gerenciar
dispositivos de hardware com o HD, fazer o gerenciamento de interrupções
dentro da área protegida do Kernel.
Por
outro lado, tudo o que o usuário faz é executado na área do usuário
(user space) como escrever um texto no editor de texto, rodar programas
em uma interface gráfica (GUI) e etc.
Essa
separação previne que os dados dos programas do usuário e os dados do
Kernel acabem interferindo um no outro o que pode causar instabilidade
no sistema, lentidão no processamento, erros nos programas e até causar
erros catastróficos no sistema operacional.
Resposta originalmente traduzida no Quora em 06/07/2019.
Sistema Operacional de Tempo Real (Real Time Operating System) é um sistema operacional especializado que é responsável por gerenciar os processos em um sistema de tempo real ( real time system.)
Ele é responsável pelo gerenciamento de processos e alocação de recursos.
O
sistema operacional em tempo real pode ser baseado em um kernel padrão
que é usado inalterado ou modificado para uma aplicação específica.
Normalmente, não inclui recursos como gerenciamento de arquivos.
Componentes do Sistema Operacional de Tempo Real:
Relógio de tempo real: (Real-time clock) Ele fornece informação para agendamento de tarefas
Gerenciador de interrupções: (Interrupt handler) Gerencia solicitações de serviços assíncronas .
Agendador: (Scheculer) Seleciona o próximo processo a ser executado.
Gerenciador de recursos: (Resource Manager) Aloca os recursos de processador e memória.
Despachante: (Dispatcher) Inicia a execução dos processos.
Os componentes de um sistema operacional de tempo real pode ser conforme abaixo:
Esta seção tem vários tópicos sobre eletrônica. Assuntos que achei interessantes e que seriam legais de compartilhar com você. Que tal escolher uma das opções no menu “Microcontroladores”?