Introdução:
Na página anterior eu falei como fiz para montar a parte mecânica do CNC Router 24X17. Nesse artigo o foco será na montagem da parte elétrica e eletrônica. Se você olhar a foto original do CNC Router mostrada abaixo (fig 1), vai ver que a instalação da parte elétrica pode ser melhorada bastante. Na verdade essa imagem tem aquele jeitão característico de ter passado por uma “photochupada” nervosa.
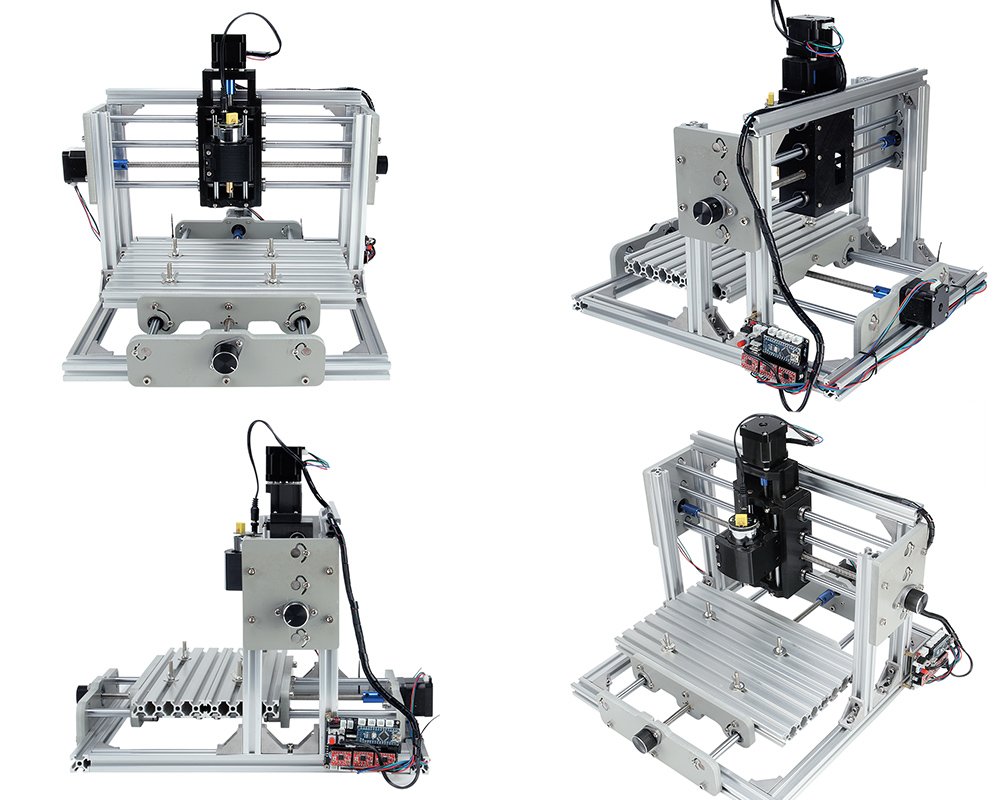
Só para comentar e sem esgotar o assunto, observando a foto acima, não fica claro alguns pontos como: o posicionamento seguro da placa controladora lógica, onde colocar a controladora laser, como fixar a fonte de alimentação e também não se fala dos limitadores de movimento e muito menos da passagem dos cabos. Nos parágrafos a seguir, vou mostrar como resolvi alguns desses tópicos. Antes de mais nada, segue abaixo o prensadão que publiquei no YT:
Laser e Spindle instalados juntos:
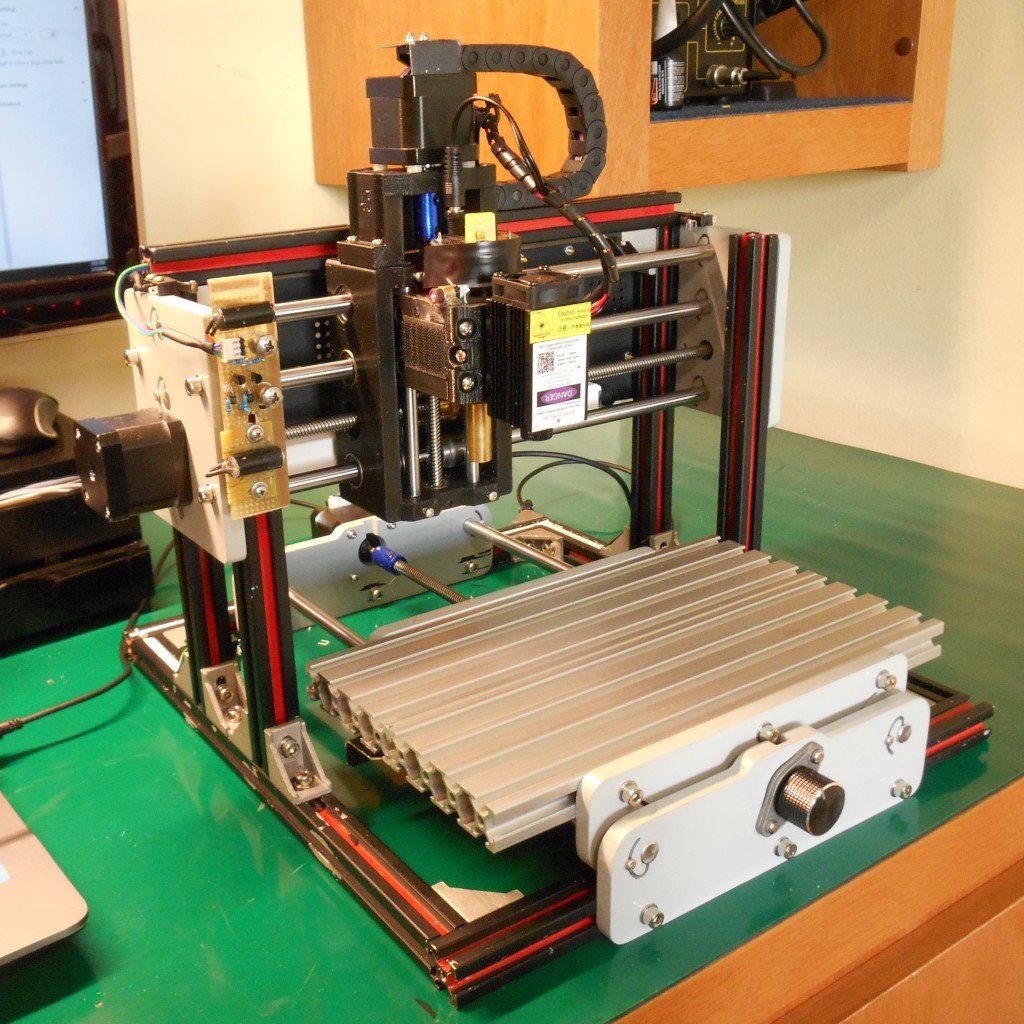
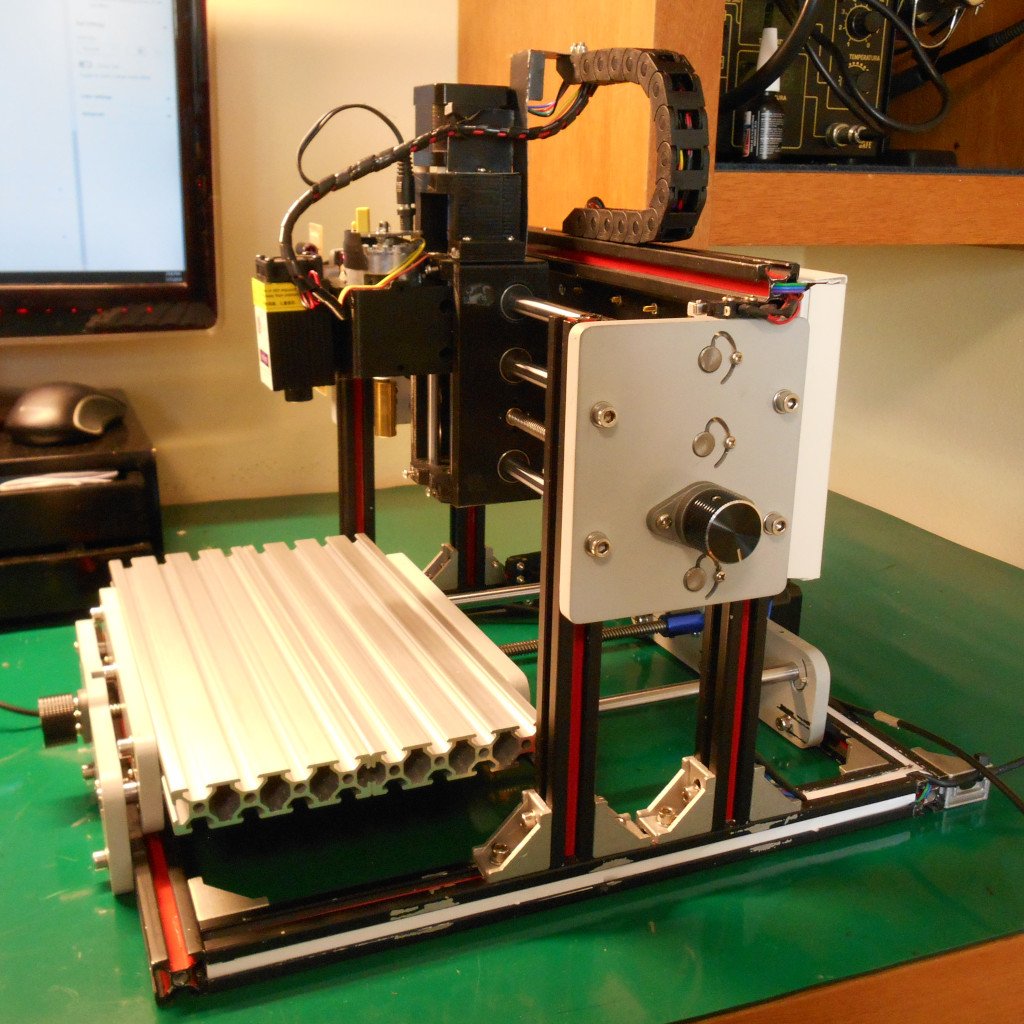
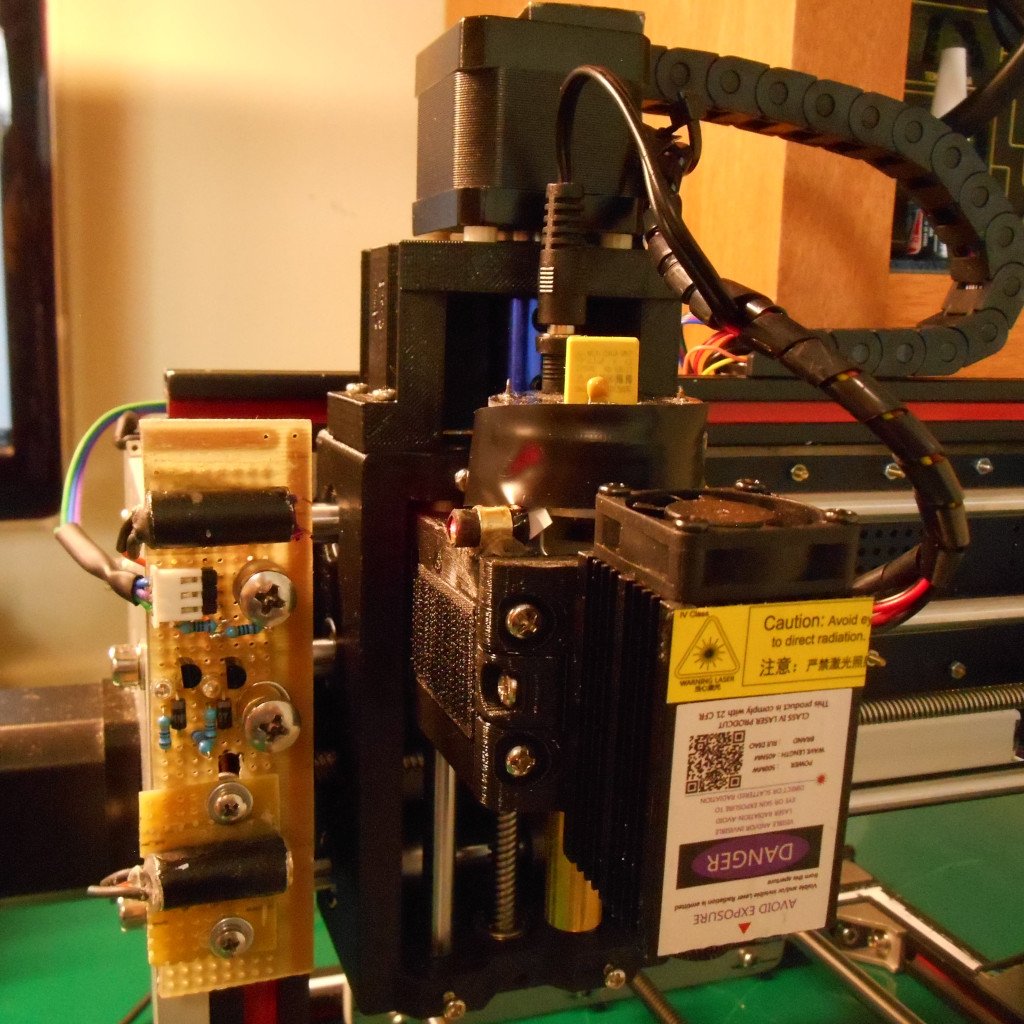
Na figura 2 abaixo, tem o CNC montado com a cabeça laser e o motor da ferramenta. Essa configuração me permite fazer uma rápida troca entre o motor e o módulo laser. No futuro talvez eu coloque um conector para permitir remover completamente o módulo laser. Outra coisa que chama a atenção é a quantidade de cabos que precisa passar, bem diferente da foto do anúncio, o que me levou a instalar uma lagarta de cabos.
Lagarta dos cabos:
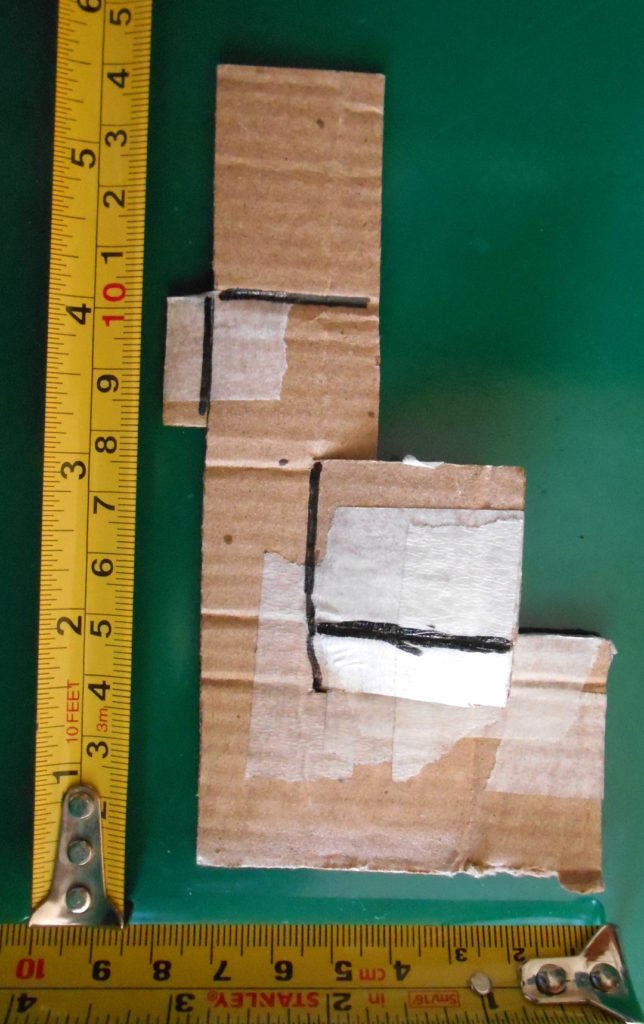
Por falar da lagarta de cabos, segue nas figuras 3 e 4 abaixo o molde e a chapa já dobrada formando o suporte da lagarta. Pessoal acostumado a dobrar chapas, se tiverem algumas dicas, compartilha aí!

Vista lateral direita:
Observando a lateral direita na figura 5, dá para perceber a chapa de fixação da lagarta dos cabos. Dá para ver os pontos que os cabos foram passados e foram protegidos pela fita de PVC branca. Como o alumínio foi pintado com tinta comum, dá para ver que a tinta está descascando em alguns lugares. Isso acontece porque o protótipo foi desmontado e montado diversas vezes até chegar na configuração atual.
Vista lateral esquerda:
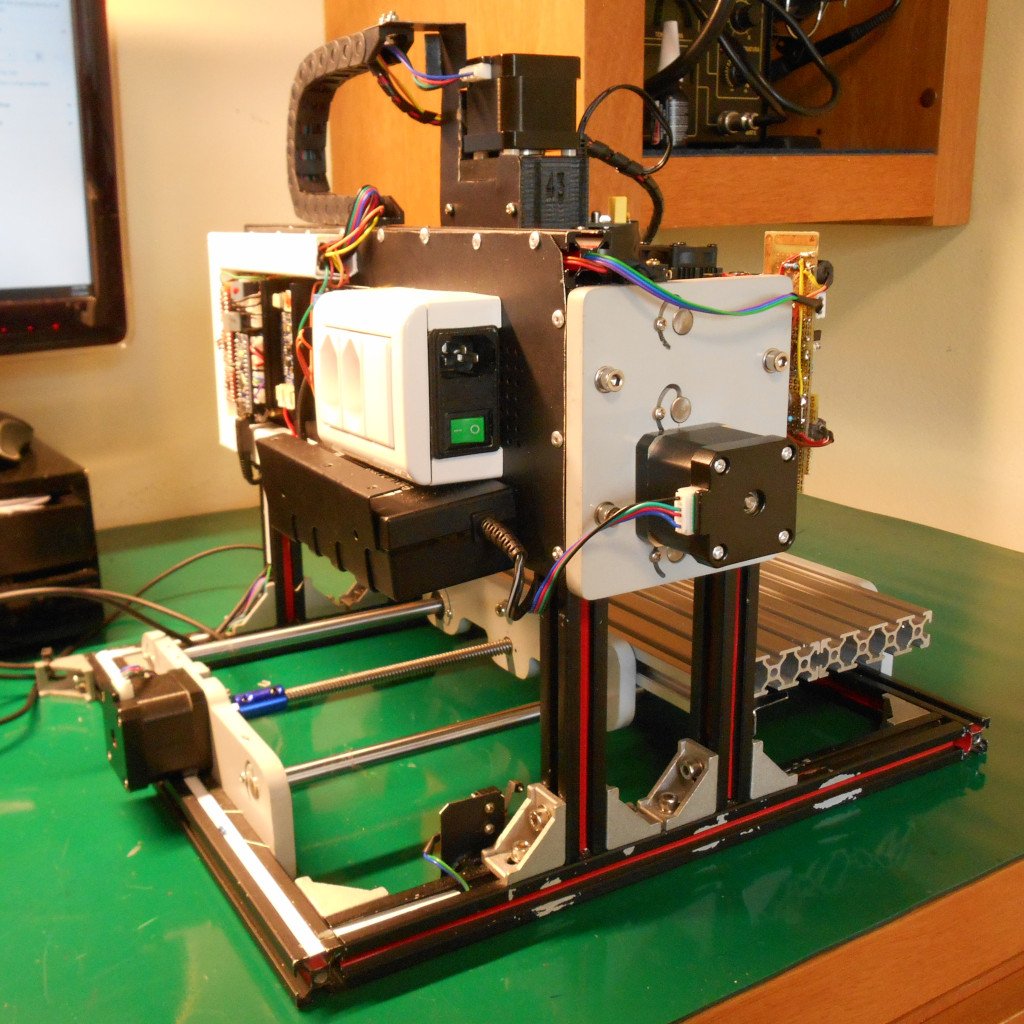
Nesse lado da figura 6 dá para perceber o sensor limite de movimentação da bandeja horizontal (eixo Y), a fonte 12V que foi fixada no frame principal bem como a régua de tomadas customizada para o CNC 24X17. Também dá para identificar parte do sensor laser de posicionamento do eixo Z, responsável por monitorar a subida e descida da ferramenta.
Vista trazeira:
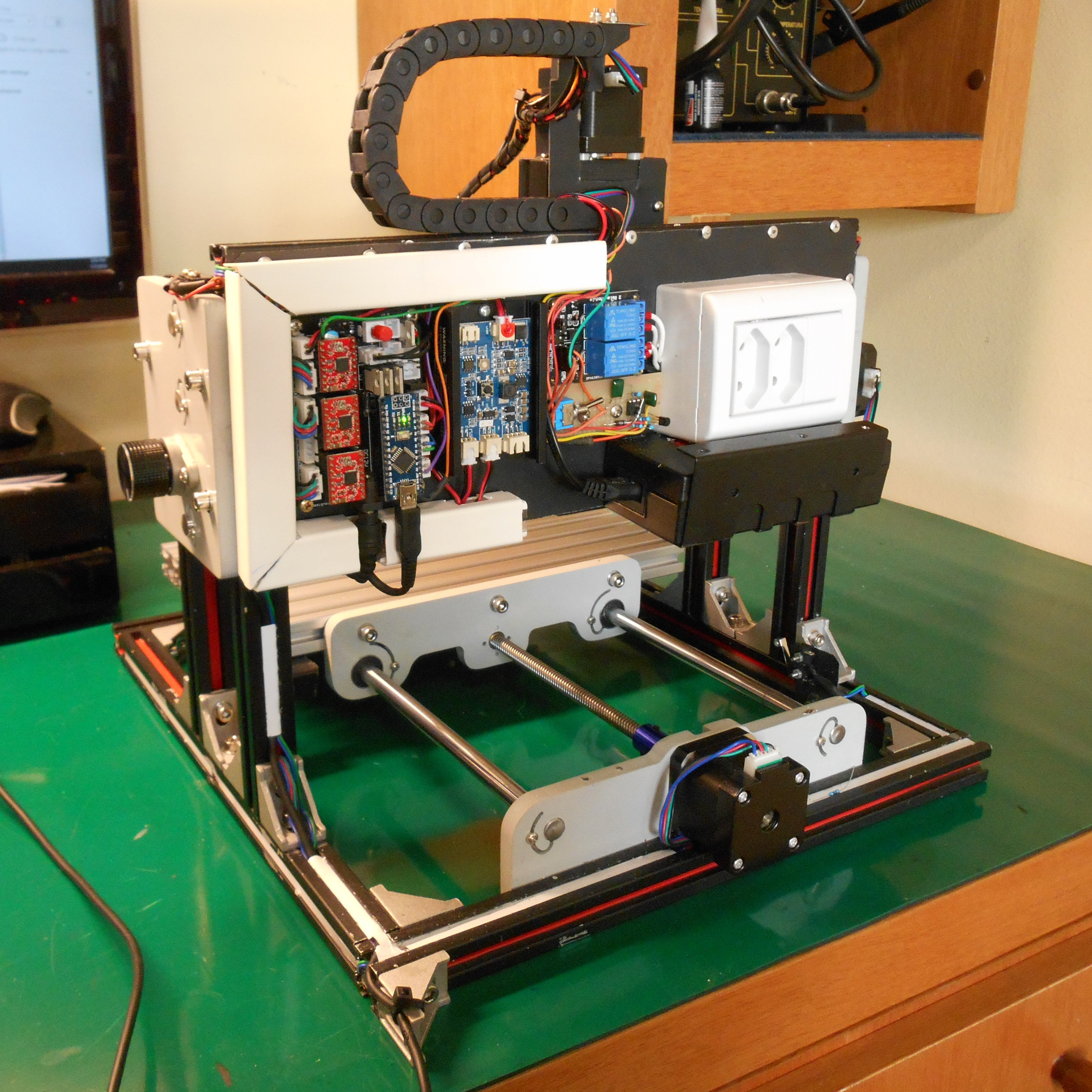
Na figura 7 abaixo dá para observar a vista traseira com a montagem dos componentes. Note que o cabo USB do Arduino Nano foi amarrado na estrutura do CNC a fim de proteger o Arduino de eventuais acidentes. Também toda fiação foi escondida e protegida por calhas de passagem de fios.
Parte eletrônica:
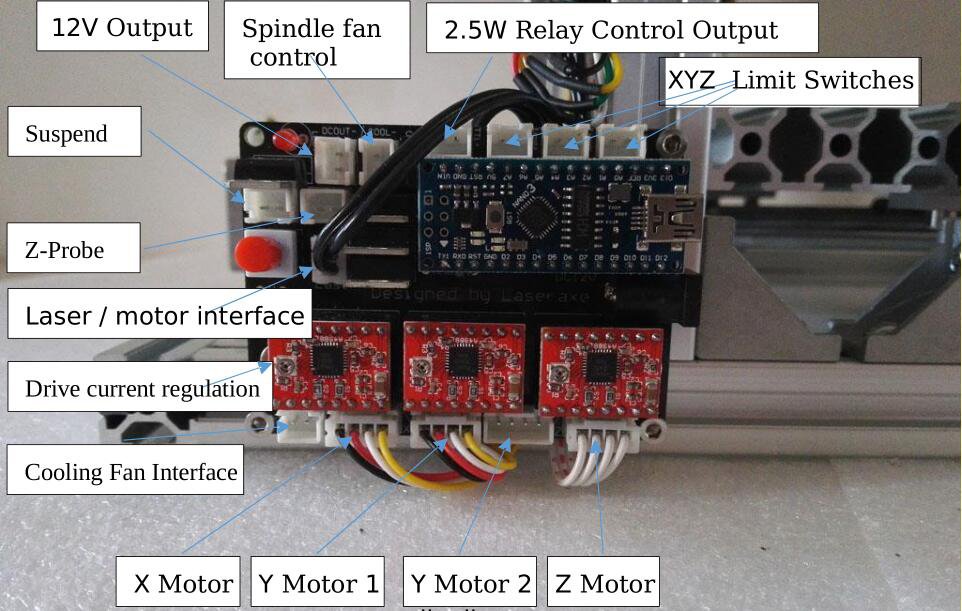
O manual da placa lógica se resume a uma foto, que é essa aqui:
O manual do laser 405nm 500mW é essa figura abaixo.
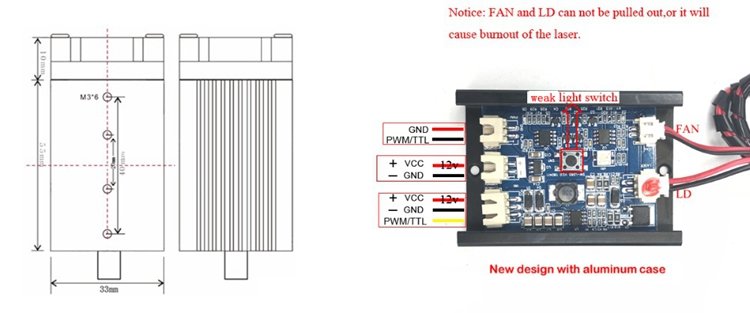
A montagem eletrônica foi acomodada na parte traseira do equipamento, conforme mostrado na figura 8. Da esquerda para a direita foram instalados: Placa controladora de sensores e motores, placa controladora do laser, módulo de relés e placa monitora da rotação do spindle.

Conforme figura 9 abaixo, a placa monitora de rotação do spindle comanda o módulo de relé Arduino. Caso o spindle esteja ligado, a placa monitora de rotação do spindle aciona o módulo de relé que por sua vez liga uma das duas tomadas auxiliares do CNC. Essa tomada auxiliar serve para acionar um exaustor ou qualquer outro equipamento de apoio à usinagem. A outra tomada auxiliar fica constantemente ligada, desde que o CNC esteja ligado.
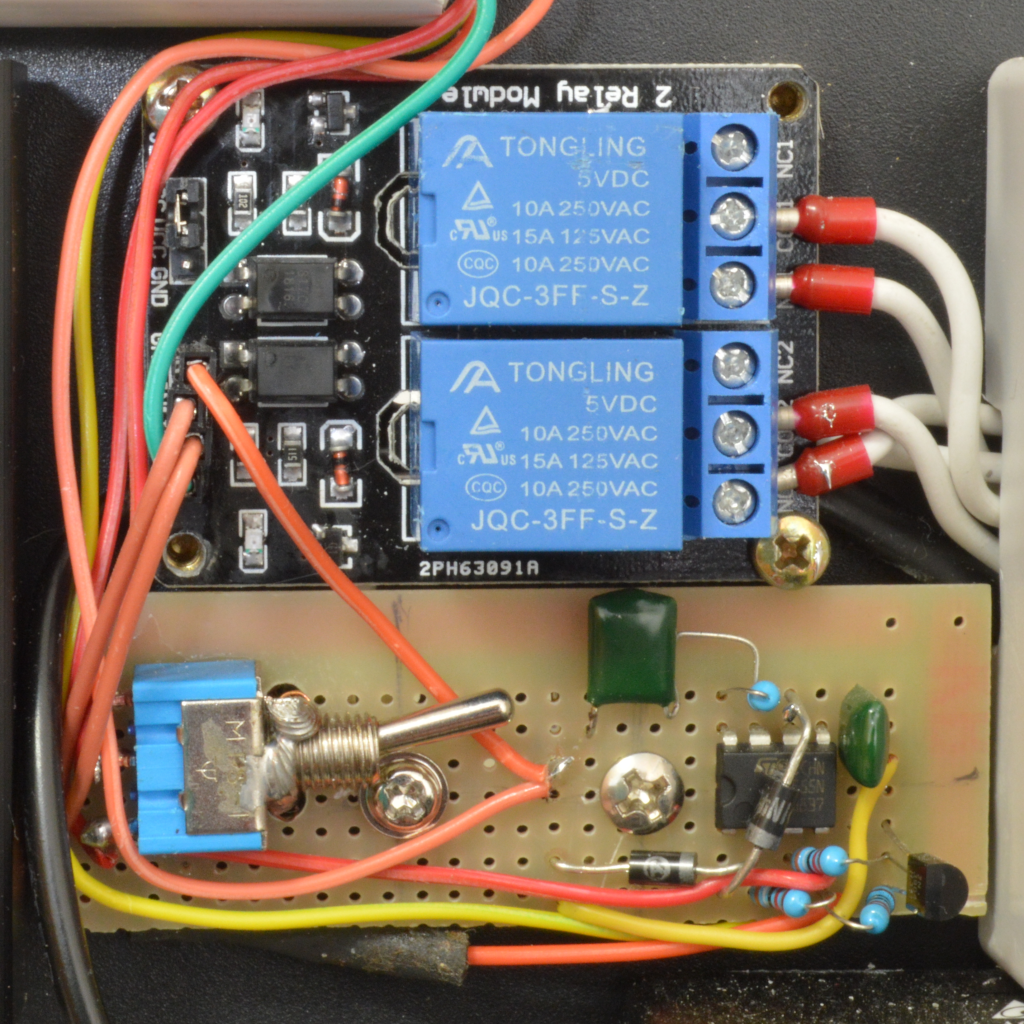
Ainda conforme figura 9, o módulo de relé funciona com 5 volts provido pela placa do Arduino Nano. Também é possível notar a chave que habilita ou não o funcionamento do canhão laser. Ela está instalada na placa monitora de rotação do spindle. Note que o canhão laser, no meu entender, é fraco e não é funcional para cortar materiais espessos e muito menos para cortar metal.
*A fonte 12V que está presa embaixo da régua de tomadas.
Na hora da prototipagem dessa solução, o que me deu bastante trabalho foi arranjar as peças de tal forma que fosse possível passar os fios, que a furação e dobras ficassem razoavelmente precisas. A régua de tomadas foi um caso à parte pois era uma caixa de sobrepor e teve que “zipar” dentro dela a chave geral, o conector de força, fusível de proteção e duas tomadas padrão ABNT, sendo que uma delas é controlada pelo módulo Arduino.
Sensores dos eixos X e Y:
A figura 10 abaixo destaca os sensores dos eixos X (movimentação horizontal) e Y (move a bandeja para frente e para tráz). São micro switches que devem ser ligados na configuração normalmente aberta. Eles servem para que a placa controladora consiga identificar a posição de home / fim de curso do CNC.

Sensor do eixo Z:
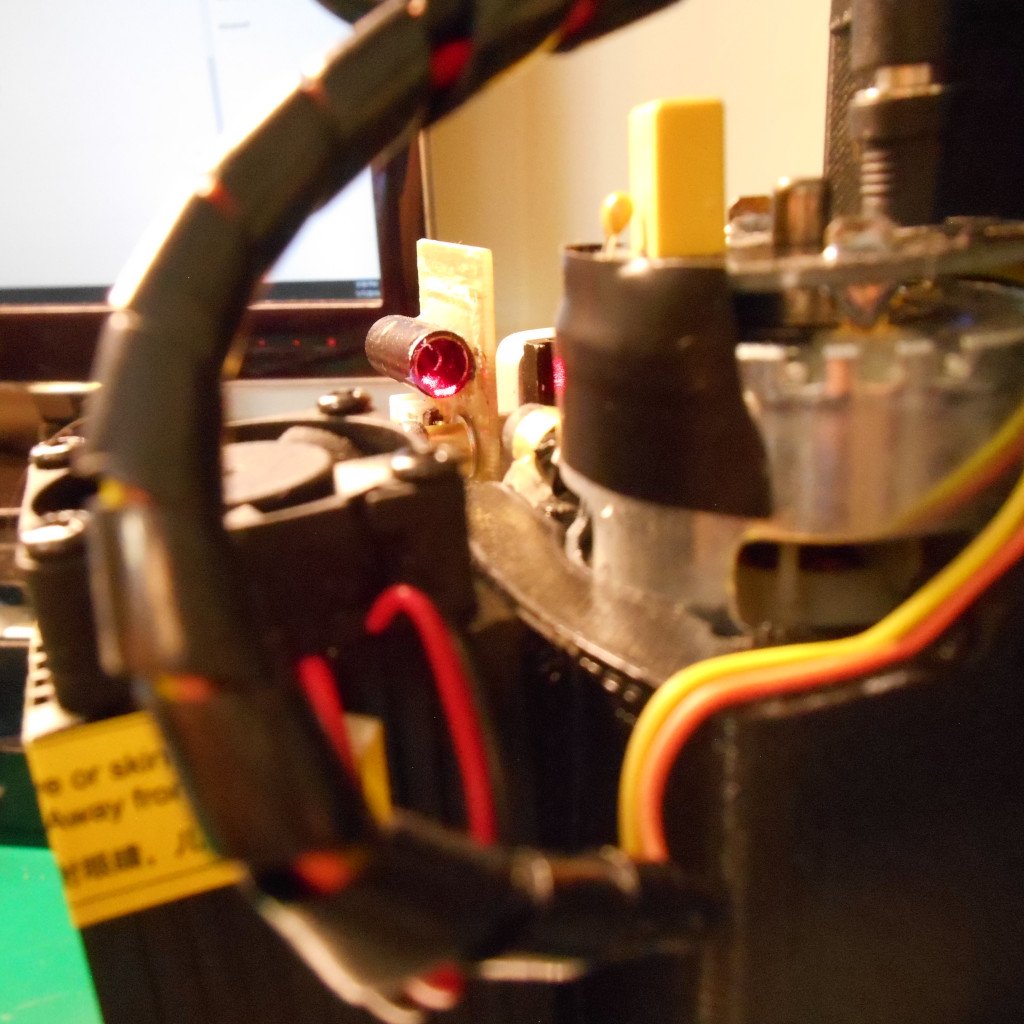
Para o limite do eixo Z, conforme figura 11 abaixo, foi utilizado um par de sensores óticos baseado em LDR acionados por laser. Isso foi necessário porque não havia espaço para os micro switches e também porque eu quis construir um sensor ótico ^.^ Foi interessante. Se você conseguir instalar sensores mecânicos no eixo Z, compartilha conosco sua solução :).
Conforme figura 12 abaixo, o led laser é alimentado pelo sinal de 3.3V do módulo Arduino. Ele aponta para sensores. Se o laser iluminar o sensor, é gerado um sinal indicando que o limite de movimentação do eixo Z (movimentação vertical da ferramenta) foi atingido. Esse sensor ficou bem legal e nos testes conseguiu funcionar tranquilamente a 5 metros de distância e dá para ser melhorado em vários aspectos.