Entendendo o funcionamento do tacômetro das ventoinhas.
Começo de tudo:
Eu estava passeando pela net esses dias e resolvi olhar como funciona o tacômetro da ventoinha. Nos sites brasileiros, apareceu até um tutorial de como tunar um Fusca 69 e na gringolândia, tinha de tudo e muitos chips com a solução pronta, tipo pega um chip, liga os fios que a gente faz tudo para você. Quando coloquei junto a keyword PLC, então o negócio ficou sério… para cima de mil doletas.
Se você curtir esse artigo, e ele der um adianto no seu trampo, não esqueça de dar uns cliques nos anúncios para ver o que os anunciantes tem para te oferecer. Vou ficar muito contente.
Então peguei na minha sucata um cooler brushless 24V xing ling sem nada de especial e, longe de querer esgotar um assunto tão extenso, decidi saciar minha curiosidade. Segue o artigo:

Power on:
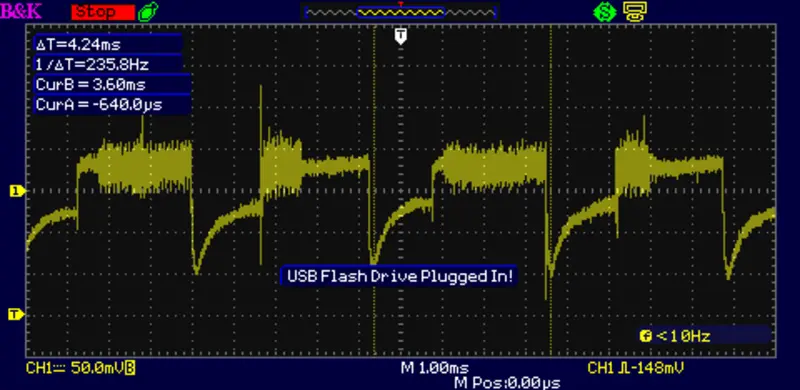
Essa ventoinha é do tipo mais comum que existe. Ela não tem controle PWM. A primeira coisa que fiz foi ligar o cooler e tentar entender o sinal do tacômetro gerado pelo fio amarelo. Catei o Ciro (Ciroscópio) e após muito tempo fuçando consegui a forma de onda mostrada abaixo, que obviamente está “errada”. Um lixo de sinal variando entre -1V e +0,5V, com ruído e picos esquisitos, típico de quem não sabe o que está fazendo.
Quando as coisas não dão certo, é hora de pesquisar na Internet. Aos novinhos que hoje acham tudo na Wikipedia, vocês tem sorte de mais.. No meu tempo tinha que comprar databook lá na Litec, que custava uma fortuna =P
Primeiras descobertas:
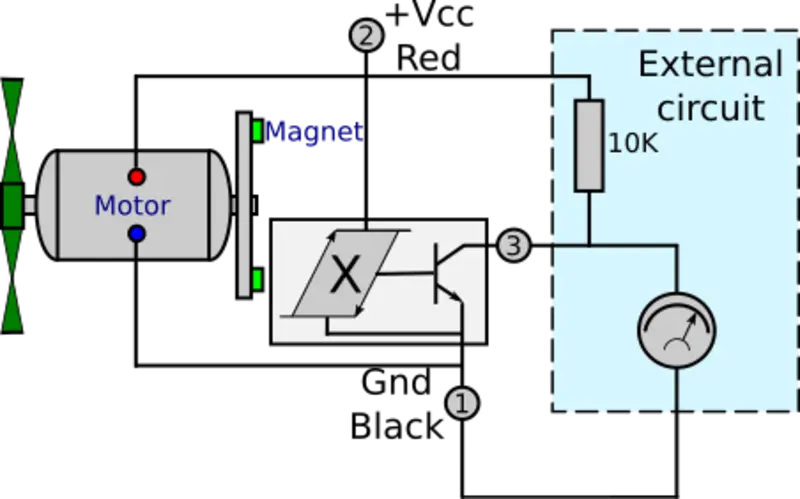
Após uma rápida pesquisa, vi que várias páginas faziam referência a um resistor de 10K entre o fio amarelo e o positivo, sendo que outras páginas estavam informando que os sensores do tacômetro normalmente são de efeito hall e configurados no modo de coletor aberto. Com essa informação, montei o modelo da figura 3 para explicar seu funcionamento.
Olhando a figura 3, o motor da ventoinha gira junto com um disco magnetizado que aciona o sensor de rotação. A passagem do imã pelo sensor gera um pulso na base do transistor, provocando sua saturação. Note que o sinal do tacômetro é o coletor do transistor (pino 3) e ele está aberto, ou seja, é um fio flutuando no ar sem qualquer conexão. O pino 3 do sensor do tacômetro precisa ser polarizado corretamente para que funcione. Isso explica porque quando eu liguei o osciloscópio direto no cabo amarelo do tacômetro, eu só obtive aquele ruído mostrado na figura 2.

Tá e como é que se polariza essa bagaça?
Conforme figura 4, o pessoal coloca um resistor de 10K entre o positivo e o sinal do tacômetro (pino 3). Ao polarizar o transistor dessa forma, você injeta via resistor a tensão da fonte no coletor do transistor de saída. Aí tudo fica lindo: Quando o transistor está cortado, o VCE do transistor sobe para o valor da tensão da fonte e aparece o sinal alto no pino 3. Quando o magneto passa pelo sensor, é gerado um pulso na base do driver de saída provocando sua saturação. VCE assume o valor de saturação (0,2V) e a saída no pino 3 vai para zero.
Apareceu o sinal:
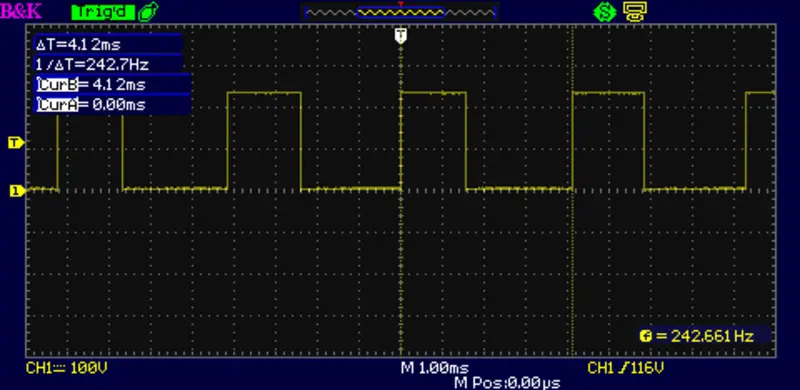
A partir do momento que eu fiz a polarização correta do tacômetro conforme figura 4 acima, o sinal apareceu na saída do sensor. O sinal gerado oscila entre 0V e 24V no caso (O cooler é de 24Volts) e pode ser visto na figura 5.
Agora temos duas questões para resolver:
(a): Quantos pulsos esse tacômetro gera a cada rotação da ventoinha?
(b): Esse sinal possui uma impedância relativamente alta (não possui corrente) e dependendo da eletrônica que ele for acionar, pode ser necessária sua adequação.
Identificando os pulsos do tacômetro:
Conforme figura 5, os pulsos estão sendo gerados, mas precisamos saber quantos pulsos são gerados a cada rotação da ventoinha.
Isso é importante para que possamos saber qual seria a base tempo correta para contagem dos mesmos e a conversão dessa informação em rotação propriamente dita.
Você tá vendo que o negócio tá ficando sério né? Acompanhe o vídeo 1 ao lado 😉
Acionando cargas maiores:
Estou considerando que o CLP está com suas entradas configuradas para o modo PNP, ou seja, 24Volts significa nível lógico ‘1’.
Quando a gente fala que o sinal do tacômetro tem uma impedância relativamente alta, ao analisarmos o circuito da figura 4 vemos que em série com o resistor de 10K, existe o sensor do ventilador com o emissor do transistor ligado à terra.
Esse tipo de configuração faz com que a saída do sensor consiga impor com muito mais facilidade o nível lógico ‘0’ do que o nível lógico ‘1’.
A lógica é simples: Quando o transistor de saída satura, ele aterra qualquer sinal que tenha no fio amarelo, consequentemente impondo 0 volts na saída. O mesmo não acontece quando o nível lógico é ‘1’, porque nesse estado, o transistor de saída está cortado e o nível lógico ‘1’ é fornecido via resistor de 10K.
Dependendo da carga que eu ponha na saída, ela pode influenciar no sinal do tacômetro derrubando a tensão de saída ao ponto de não ser entendida como nível lógico ‘1’.
Claro que se diminuirmos o valor desse resistor de 10K a corrente no circuito vai aumentar, mas a pergunta que não quer calar é a seguinte:
Qual é o máximo de corrente que pode passar pelo sensor do ventilador na hora que ele está impondo o nível lógico ‘0’? Dependendo do que for feito, ele vai queimar.
Embora um ventilador custe uma merreca, um equipamento inteiro pode vir a parar por conta da queima de um cooler.
Dito isso, dependendo da aplicação, pode ser necessária a construção de um driver de sinal para desviar a corrente que passa pelo sensor do ventilador.
Pensando nessa questão, acompanhe a descrição do circuito da figura 6.
A saída do tacômetro continua a ser polarizada por um resistor R1 de 10K ligado à Vcc. O sinal do tacômetro é injetado na base de Q1 que está configurado como uma chave liga – desliga.
Quando Q1 entra em condução, ele consegue injetar um sinal positivo em PLC_Input. Quando Q1 está cortado, R3 de 100K garante o nível lógico ‘0’ em PLC_Input.
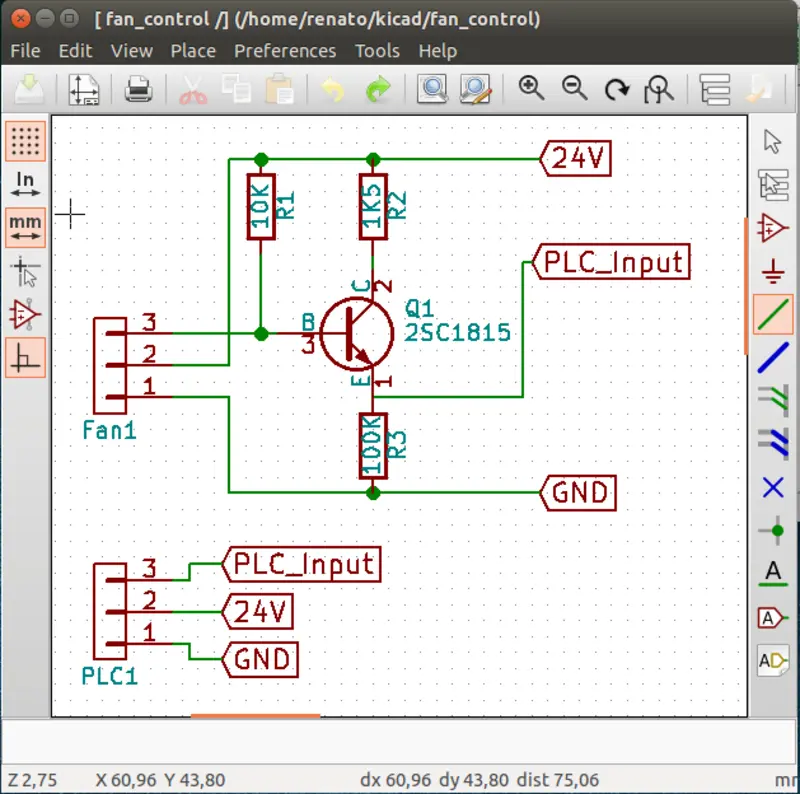
Esse driver permite que o sinal de saída passe de 2,4mA para 16mA, um aumento perto de 660%, o transistor Q1 não vai queimar se a saída “PLC_Input” for aterrada fora que o valor de R2 (1K5) foi pensado da seguinte forma: O sinal “PLC_Input” tem que conseguir acionar a entrada de um CLP e se eu ligar o emissor de “Q1” à terra, “Q1” não pode queimar.
Testando o driver:
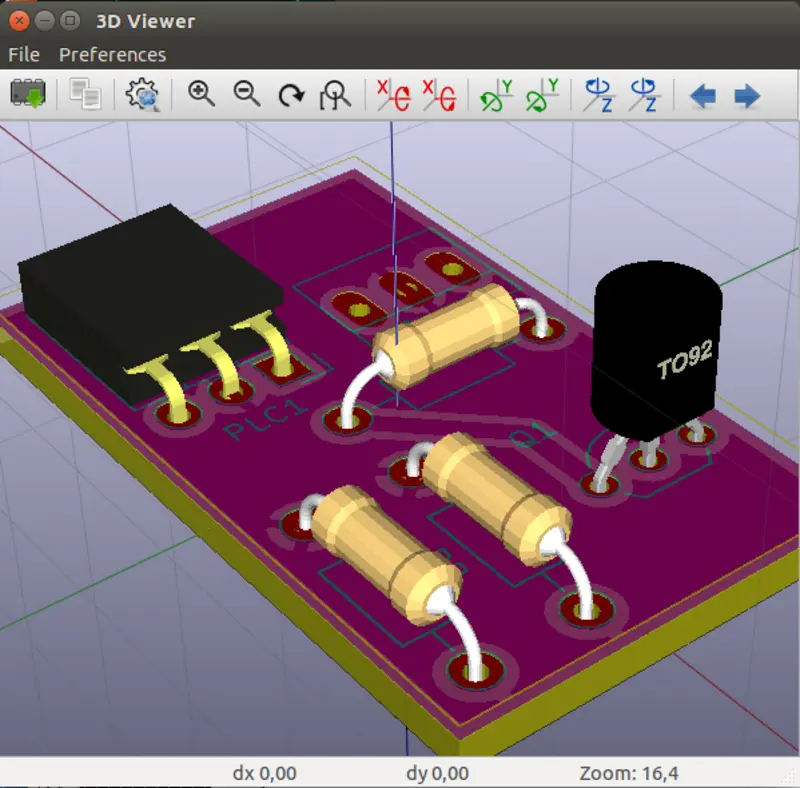
Acompanhe no vídeo 2 abaixo tem a apresentação de um driver simples e a figura 7 abaixo mostra a concepção artística dessa plaquinha no KiCad.
Finalizando:
Como dito inicialmente, longe de querer esgotar o assunto, claro que existem outros métodos para se fazer o interfaceamento incluindo mudar a configuração das entradas do CLP do modo PNP para o NPN.
Cada caso é um caso que tem sua respectiva solução.
Se ajudar alguém, legal. Se tiver algo para melhorar, me avisa que a gente dá um jeito.
Grande abraço!
By Renato de Pierri
17/Dezembro/2015